Проект АПСС.
1. Количество подводных лодок проекта: 2.
2. Изображение проекта:
3. Состав проекта:
|
№ |
Наименование корабля |
Заводской номер |
Даты |
Примечания |
||
|
закладки |
спуска |
окончание строительства |
||||
|
ЛЕНИНГРАД: Завод №196 («Судомех») (2) |
||||||
|
1 |
? |
? |
? |
? |
1935 |
|
|
2 |
? |
? |
? |
? |
1936 |
|
4. История проекта:
АПСС (аэроподводный самодвижущийся снаряд) представляет собой однокорпусную, одноместную, сверхмалую подводную лодку, конструкции Остехбюро (г. Ленинград). Главный конструктор К.В. Старчик. Прочный корпус сигарообразной формы с накладными прочными килями разделен на пять отсеков. В носовом отъёмном отсеке размещен боезаряд с 360кг взрывчатого вещества, снабженный неконтактным взрывателем. Второй отсек содержит носовую полубатарею аккумуляторов (33 элемента) и часть вспомогательной аппаратуры телеуправления.
Третий, центральный отсек - командный пост при ручном управлении. Место водителя (пилота) оборудовано штурвалом управления, контрольными приборами и перископом, выдвигающимся над снарядом на 650мм. Сверху место водителя закрыто прочной рубкой с четырьмя иллюминаторами и люком. Здесь же размещена основная часть аппаратуры телеуправления (приёмники и дешифратор), балластная, уравнительная и торпедозамещаюшая цистерны, а также механизмы управления торпедным аппаратом. Дифферентовка производится перемещением твердого балласта (груза) и приемом надлежащего количества воды в уравнительную цистерну.
Четвертый отсек отведен под кормовую полубатарею аккумуляторов с 24-мя элементами и часть аппаратуры телеуправления с рулевыми машинами типа Элемру. работающими на сжатом воздухе.
В пятом, кормовом отсеке установлен электродвигатель постоянного тока, производства завода Электросила, мощностью 8,1 кВт, с гребным валом.
На кормовой части лодки размещены хвостовое оперение с рулями и гребной винт. В прочных килях установлены четыре баллона на 62 литра сжатого (160 кг/см.кв.) воздуха, используемого для продувки цистерн и работы элементов автоматики. Между килями располагается открытый торпедный аппарат под 18-дюймовую торпеду образца 1912г.
Сверху на прочном корпусе установлены мачты антенного устройства, а на верхней поверхности 2-го и 5-го отсеков - иллюминаторы с фарами, направленными вверх, служащими для опознания и наблюдения снаряда в темное время. На кормовом отсеке крепится прибор, периодически выбрасывающий в воду зеленый флуоресцирующий состав для лучшего слежения за снарядом в светлое время. Перед рубкой установлен аварийный буй с электролампой и телефоном. Транспортно-подвесные узлы расположены в диаметральной плоскости на 2-м и 4-м отсеках, расстояние между узлами 4,9м.
Основным режимом управление АПСС является радиоуправление снарядом при визуальном наблюдении его с самолета-водителя или корабля. Осуществляется путем передачи шифрованных радиосигналов (команд) в ультракоротковолновом диапазоне (4,5м - 5,5м) при надводном положении АПСС или в длинноволновом диапазоне при "малом погружении" на глубину 3м. Самолетная часть системы управления унифицирована с принятой ранее на вооружение системой управления "торпедными катерами волнового управления" - ТК ВУ.
На АПСС устанавливаются специальные приёмники УКВ и ДВ с дешифратором. Последний преобразует радиокоманды в посылки постоянного тока, управляющие элементами автоматики снаряда. Число команд - 24.
Вспомогательный режим - механическое управление. Осуществляется с помощью механического автоматического "курсопрокладчика", работающего путем огибания датчиком фигурного профиля (соответствующего избранному маршруту) по сигналам таймера, с учетом скорости движения снаряда. Этот режим используется при "большом погружении", то есть на глубине 10м, когда радиоуправление невозможно из-за непрохождения радиоволн через воду. Движение в этом режиме может продолжаться до 5 часов.
Ручное управление. Режим управления "пилотом" - водителем АПСС. Все принципы управления сохраняются теми же, что при радиоуправлении, но управление нужными элементами автоматики переключается с выхода дешифратора на штурвал управления АПСС.
Всего построено 2 АПСС, на ленинградском заводе Судомех, причем один (1935г.) в клепаном, а второй (1936г.) - в сварном исполнении.
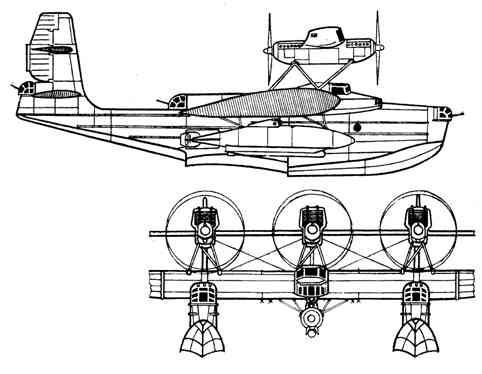
В качестве носителя предполагалось использовать самолет-носитель АНТ-22 (Морской крейсер МК-1, построен в 1934 г.) Представлял собой двухкорпусную, цельнометаллическую, шестимоторную летающую лодку. Главный конструктор А.Н. Туполев. Уникальный, крупнейший из когда-либо построенных самолетов этой схемы.
Обе ПЛ прошли заводские испытания. Однако на вооружение их не приняли. В официальных отчетах о реализации данного проекта говорилось, что "проблема дистанционного управления этой лодкой далека от положительного решения". До испытаний с участием водителей дело вообще не дошло. В 1937 - 1938 гг. лодки АПСС были разобраны.
5. Схема транспортировки:
6. Тактико-технические данные проекта:
Длина наибольшая 10 м.
Ширина наибольшая 1,25 м.
Водоизмещение 8 т.
Глубина погружения 10 м.
Полная скорость подводного хода 4,5 уз.
Полная скорость надводного хода не рассчитан.
Дальность плавания экономичным ходом:
подводная 25-28 миль
надводная не рассчитан.
Вооружение 1 шт 18’’ торпеда.
Внутренний боезаряд 550 кг.
Экипаж 1 чел (как вариант).
7. Источники:
- Лесниченко В.А. и Гусев А.Н. «Самолет и подводная лодка», Галея Принт, Санкт-Петербург, 2001г.
- «История отечественного судостроения», т.4, Санкт-Петербург, 1996г.
- Тарас А.Е. "Сверхмалые подводные лодки 1914-2004", Харвест, Минск, 2004гю
Возврат на Главную страницу сайта «Штурм Глубины»
Дизайн, подборка материала и верстка Николаев А.С.© 2003-2014