Проект многоцелевого проницаемого
подводного
аппарата.
1.
Количество аппаратов проекта: нет
2.
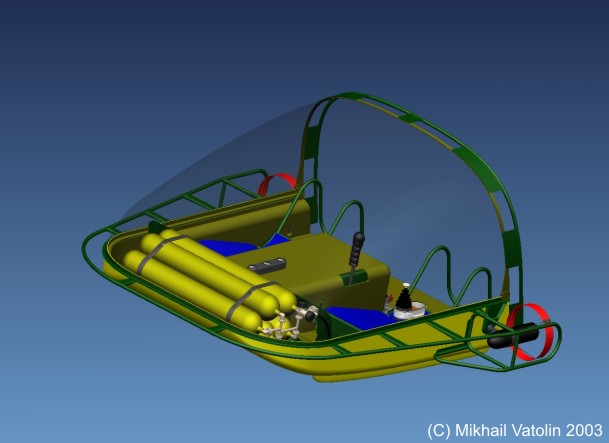
Изображение проекта:

3. История проекта:
Многоцелевой
проницаемый подводный аппарат разработан с использованием передовых технологий
Российского авиастроения. Он относится к подводным средствам движения (ПСД)
"мокрого" типа, предназначен для перемещения двух водолазов при
проведении подводных погружений в различных целях. В отличие от других
аппаратов подобного класса, представленных в настоящее время на рынке ПСД
коммерческого назначения, представленный аппарат имеет меньшие габаритные
размеры, что достигнуто за счёт сведения к минимуму объёмов, не имеющих
полезного использования. Конструкция проработана таким образом, что при
производстве аппарата требуется минимальное количество технологической
оснастки, что значительно снижает себестоимость производства. Предлагаемая
компоновка обеспечивает покидание аппарата экипажем в аварийной ситуации без
особых затруднений. Техническое обслуживание аппарата может легко
осуществляться в полевых условиях и на борту водолазных судов.
Корпус выполнен
из композиционных материалов на основе стеклопластиков, широко используется
литейный пенопласт в качестве лёгкого заполнителя, для силовых элементов
используются коррозийностойкие алюминиевые сплавы и
нержавеющие стали. Прозрачный обтекатель выполнен из оргстекла. Внутри корпуса
расположены: аккумуляторный отсек, система жизнеобеспечения и управления
плавучестью, система управления, сидения экипажа, одновременно являющиеся и
цистернами плавучести. Пилот сидит на левом сидении, а пассажир на правом.
Снаружи корпуса имеется привальный брус, выполненный из алюминиевых труб, он
предназначен для защиты от соударений корпуса и двигателей, расположенных в
хвостовой части по бортам, а также для установки на нём дополнительного
оборудования. Двигатели установлены на вращающихся осях и имеют гребные винты в
кольцевых насадках. Управление аппаратом по тангажу
осуществляется ручкой управления, расположенной справа от пилота, через систему
жёстких тяг и качалок. Управление по курсу осуществляется заданием асимметрии
тяги двигателей с помощью кнопок, расположенных на ручке управления. Управление
тягой двигателей осуществляется с помощью ручки управления двигателями,
расположенной слева от пилота, ручка установлена на гермобоксе
с электронным блоком управления двигателями. Аккумуляторный
отсек расположен между членами экипажа, он выполнен герметичным из алюминиевого
сплава, сверху прикрыт пластиковым кожухом. Система жизнеобеспечения и
управления плавучестью включает в себя пять баллонов общей ёмкостью 60 литров,
расположенных в носовой, части аппарата, редуктор первой ступени, систему
воздушных магистралей, разъёмы для подключения лёгочных автоматов или полнолицевых масок любых типов, коллектор с шаровыми
кранами для наполнения цистерн плавучести. Цистерны плавучести имеют патрубки,
выходящие под днище аппарата и сообщающиеся с внешней средой. Объём цистерн
составляет 30 литров, что обеспечивает поддержку аппарата на плаву при
полностью продутых цистернах, при полностью заполненных водой цистернах аппарат
имеет плавучесть примерно равную нулю. Экипаж использует для дыхания воздух из
бортовых баллонов, но при этом имеет собственные дыхательные аппараты, которые
используются при выходе за пределы аппарата и при аварийном покидании его. На
борту аппарата имеется водолазная консоль, содержащая манометр, аналоговый
глубиномер и магнитный компас. По желанию заказчика можно установить и ряд
дополнительных приборов (декомпрессиметр,
осветительное оборудование, фото и видеоаппаратура, эхолот, гидролокатор,
автоматические гарпунные пушки). Органы управления дополнительным оборудованием
размещаются перед пассажиром, который выполняет роль
оператора данных систем.
Возможные
области применения:
· Обслуживание подводных
коммуникаций (трубопроводов, кабелей...)
· Осмотр подводных частей
крупных гидротехнических и портовых сооружений
· Обслуживание подводных ферм морекультур
· Поиск затонувших объектов
· Спасательные работы
· Подводная археология
· Прикладные подводные
исследования
· Защита пляжей от морских
хищников
· Съёмка подводных фильмов
· Дайвинг, подводный туризм
В настоящее время
разработано техническое предложение. Для дальнейших работ необходимо
финансирование. Разработка проводится с использованием новейших компьютерных
технологий проектирования, расчёта и подготовки производства, что позволит
завершить её в кратчайшие сроки. Имеется мощная производственная база,
позволяющая качественно и в кратчайшие сроки обеспечить изготовление аппарата в
любых количествах и любых модификаций. В настоящее время на мировом рынке
представлено всего 6 аппаратов подобного типа, созданных серьёзными
разработчиками, (разработки конструкторов-любителей не в счёт). В
условиях стремительного развития дайвинга, как в
России, так и за рубежом потребность в таких аппаратах будет постоянно
возрастать, что делает инвестиции в подобные проекты очень перспективными.
4.
Внешний вид аппарата:
5. Тактико-технические данные проекта:
Габариты (мм):
Длина 2220
Ширина 2160
Высота 1040
Максимальная скорость (узлов) 4
Максимальная глубина погружения (м) 40
Максимальная дальность (мор.
миль) 13,7
Запас хода (ч) 4,6
Сухой вес (кг) 370
Экипаж (чел.) 2
Переменный объём системы управления плавучестью (л) 30
Объём баллонов с запасом воздуха (л) 5х12=60
Тяга двигателей на швартовах (кГс) 2х20=40
Напряжение питания двигателей (В) 12
Запас энергии в аккумуляторах (Ач) 330
6. Источники:
Возврат на Главную
страницу сайта «Штурм Глубины»
Дизайн,
подборка материала и верстка Николаев А.С.© 2002-2003