Проект глубоководного аппарата "Мир".
1. Количество аппаратов проекта: 2
2. Изображение проекта:

ГОА "Мир-2" по состоянию на 2008 год
3. Состав проекта:
|
Наименование корабля |
Заводской номер |
Даты |
||
|
закладка |
спуск на воду |
вступление в строй |
||
|
ФИНЛЯНДИЯ: Компания "Rauma Repola" |
||||
|
- |
05.1985 |
11.1987 |
12.1987 |
|
|
- |
05.1985 |
11.1987 |
12.1987 | |
4. История проекта:
Идея глубоководных обитаемых аппаратов (ГОА) и начальный проект были проработаны в АН СССР и КБ "Лазурит". ГОА "Мир-1" и "Мир-2" были построены в Финляндии концерном "Раума Репола" (Rauma Repola) в 1987 году. Аппараты создавались под научно-техническим руководством ученых и инженеров Института океанологии РАН имени П.П.Ширшова. Создание аппаратов было начато в мае 1985 года и закончено в ноябре 1987 года. В декабре 1987 года были проведены глубоководные испытания аппаратов в Атлантике на глубине 6170 метров ("Мир-1") и 6120 метров ("Мир-2"). Аппараты были установлены на судне обеспечения "Академик Мстислав Келдыш", построенном в 1981 году в Финляндии и переоборудованном в 1987 году для проведения работ с ГОА.
Обитаемый прочный корпус и балластные сферы ГОА изготовлены из никелевой стали специального назначения (Мартенситовая, сильно легированная сталь, с 18% никеля. Сплав имеет предел текучести - 150 кг/кв.мм (у титана - около 79 кг/кв.мм). Производитель: финская фирма "Локомо", входящая в состав концерна "Раума Репола"). Сферы собраны из полусфер, созданных путем непрерывного литья в форму и затем обработанных на станке. Обитаемая сфера имеет внутренний диаметр 2,1 м. Центральный пилотский иллюминатор имеет диаметр 200 мм, а два боковых - 120 мм. Балластные сферы могут вместить около тонны воды. Рама из нержавеющей стали связывает четыре сферических корпуса в единую конструкцию. Верхняя усиленная часть рамы оканчивается подъемным устройством, которое стыкуется с захватом троса спуско-подъемного устройства (СПУ). Внизу рама опирается на лыжи из синтактика и стеклопластика. Легкий корпус, в форме вытянутой капли, закрывает раму и всю внутреннюю начинку аппарата. Половинки корпуса выклеены из синтактика и кевлара. В корме установлено хвостовое оперение, его крыло поворачивается в горизонтальной плоскости, обеспечивая курсовую стабилизацию. Под легким корпусом расположены цистерны главного балласта, продуваемые сжатым воздухом.
Движительный комплекс представлен тремя гидромоторами с винтами, защищенными насадками. Отличная маневренность аппаратов обеспечивается возможностью поворота насадки маршевого движителя в диапазоне ±60° и поворотом в диапазоне +110° + -60° боковых движителей. Управление частотой оборотов и поворотом всех движителей осуществляется из кабины при помощи джойстика управления движением. За счет кормового движителя аппарат развивает скорость до 5 узлов. Боковые движители обеспечивают скорость хода около 1 узла. Энергетический комплекс состоит из 3 маслозаполненных аккумуляторных боксов. Из железо-никелевых аккумуляторов емкостью 700 А/ч собраны две батареи: с напряжением 120 В и запасом энергии 84 кВт/ч, питающая электромоторы 1 и 2-й систем гидравлики, наружные светильники и вспышку; и с напряжением 24 В и запасом энергии 17 кВт/ч, предназначенная для питания аппаратуры связи, навигации, фотокамер, измерительных датчиков. Аварийная никель-кадмиевая батарея установлена в прочной обитаемой сфере и питает электромотор 3-й системы гидравлики, которая используется для аварийного сброса боковых и кормового движителей, кистей манипуляторов, нижнего аккумуляторного бокса весом 1200 кг и отдачи аварийного буя с кевларовым тросом проводником. Твердый балласт - никелевая дробь - удерживается электромагнитами в стеклопластиковых бункерах. Все подвижные забортные устройства работают от гидропривода.
Система жизнеобеспечения ГОА не отличается от стандартных систем других аппаратов и включает: вентиляторы, прогоняющие воздух через кассеты с гидроокисью лития или натрия, кислородные баллоны с регуляторами расхода и приборы контроля атмосферы кабины. ГОА оборудованы системами надводной и подводной связи, навигации, обеспечивающей точную привязку аппаратов относительно донных маяков, измерительными комплексами, в состав которых входят до 9 гидрофизических датчиков, эхолотами, профилографами, магнитометрами, локаторами кругового и секторного обзора, теле- и фотосистемами, прожекторами и светильниками. Резервные вводы позволяют устанавливать на аппараты дополнительные комплексы и аппаратуру. Общий вес аппаратов составляет 18,5 т.
В январе-сентябре 2004 года силами Института океанологии РАН совместно с ФГУП "Факел" был проведен капитальный ремонт обоих ГОА с их полной разборкой, испытаниями прочности корпусов, частичной заменой элементов, узлов и оборудования, последующей сборкой и испытаниями вновь собранных аппаратов. В результате "Мир-1" и "Мир-2" получили сертификат на класс от международного регистра "Германский Ллойд" до 2014 года.
РАН разработан ряд оригинальных приборов, позволяющих значительно расширить возможности ГОА типа «Мир»:
- глубоководный малогабаритный телеуправляемый модуль «Сергеич» (глубина 6000 м), оборудованный высокоразрешающей телекамерой и светильниками, который устанавливается
на ГОА, может уходить от него на расстояние 100 м и управляется по кабелю изнутри кабины аппарата;
- инерциальная система навигации, синтезированная на базе допплер-лага, гирокомпаса и глубиномера. Система дает возможность вычислять местоположение ГОА под водой
с высокой точностью;
- ряд новых конструкций пробоотборников для взятия проб горячих флюидов из гидротерм, осадков и т.д.;
- гидроакустическая система, обеспечивающая выход ГОА в полынью, при проведении погружений в ледовых условиях. Система разработана специально для проведения
глубоководных операций в Арктике.
В последнее время также разработан большой
комплекс методик для проведения научных исследований с применением глубоководных обитаемых аппаратов. Кроме того, разработаны и внедрены в практику глубоководных
работ две методики, основанные на новейших технологических разработках:
- методика прямой телевизионной трансляции пакета видеосигналов с глубины 3800 м по оптоволоконному кабелю на поверхность океана и далее через спутник на землю.
Такая операция была проведена трижды. Во время последней операции 25 июля 2005 г. передачу с «Титаника» смотрел весь мир в течение 2,5 часов по каналу Discovery;
- методика проведения подводно-технических операций и глубоководной видеосъемки с применением 4-х обитаемых аппаратов одновременно. В сентябре 2003 г. два ГОА типа
"Мир" и два американских аппарата "Deep Rover" встретились под водой на гидротермальном поле Lost City и провели интересный комплекс научных исследований и
видеосъемок.
2 августа 2007 года в рамках экспедиции "Арктика 2007" был совершен первый в мире спуск глубоководных обитаемых аппаратов "Мир" в точке географического Северного полюса на глубину 4300 метров. Во время этого беспрецедентного погружения на дне был установлен титановый российский флаг. Достижения этой экспедиции занесены в книгу рекордов Гиннеса.
В настоящее время в Институте океанологии РАН прорабатывается несколько проектов, в рамках которых предполагается проведение научных исследований и подводно технических работ с применением ГОА. Один из проектов - комплексные исследования океана в кругосветном плавании судна "Академик Мстислав Келдыш". Во время этой экспедиции планируется изучить гидротермальные поля на дне в различных районах Мирового океана и провести погружения на несколько затонувших объектов.
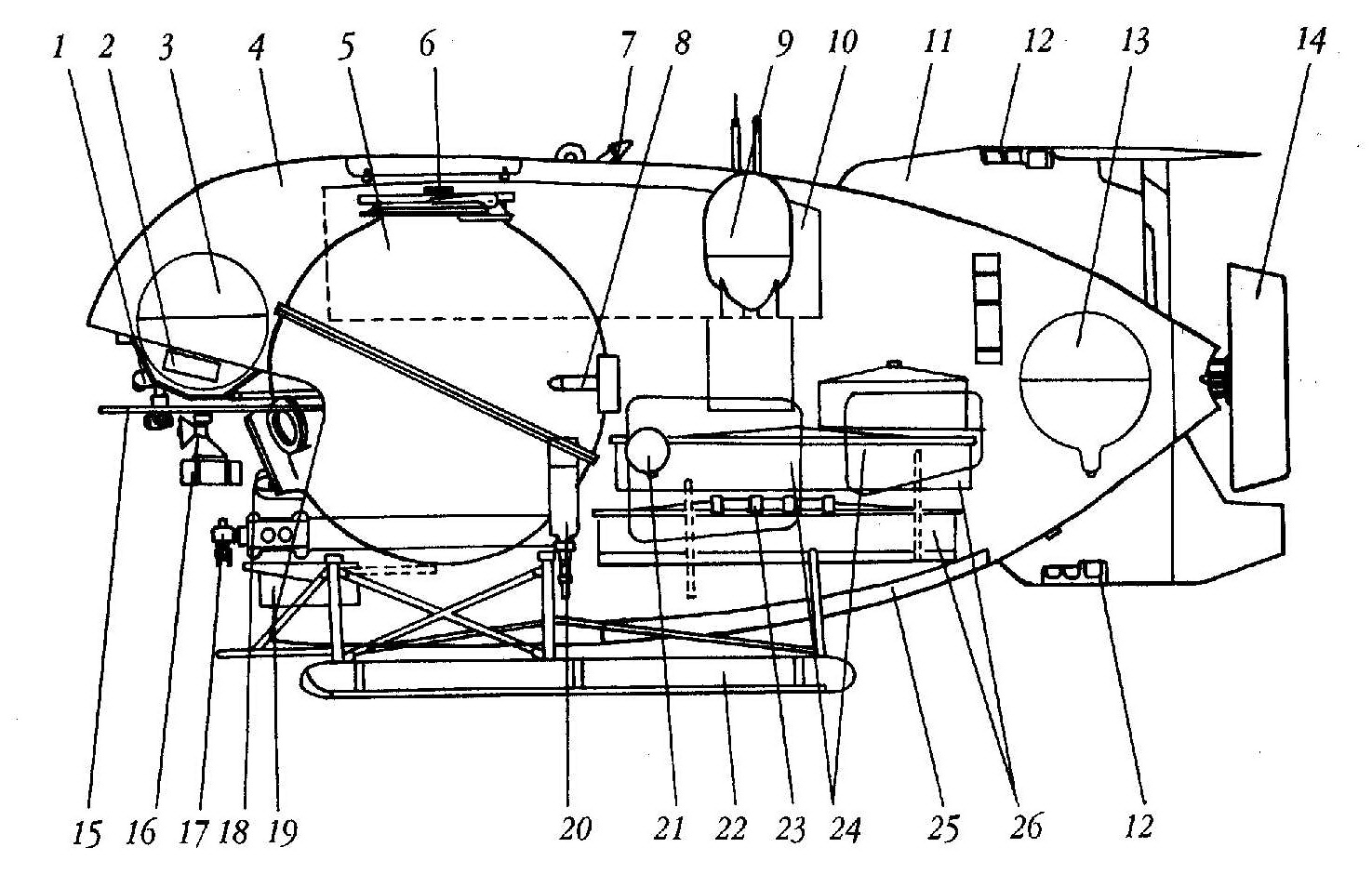
5. Схема проекта:
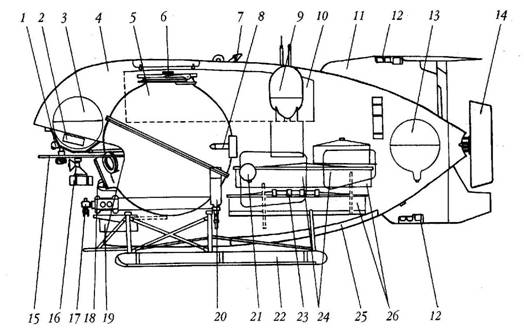
Укрупненная схема ГОА типа "Мир" (317 Кб)
(до капитального ремонта 2004 года)
1 - гидролокатор; 2 - фотовспышка;
3 - носовая балластная сфера; 4 -легкий корпус; 5 - прочный корпус; 6 - люк; 7 - рым;
8 - боковые движители; 9 - аварийный буй; 10 - цистерна главного балласта;
11 - стабилизатор; 12 - гидрофоны; 13 - кормовая балластная цистерна; 14 -маршевый
движитель; 15 - поворотная штанга; 1б - поворотная рама; 17 -манипулятор;
18 - датчики системы сбора данных; 19 - бункер для образцов; 20 - бункер с дробью;
21 - баллон воздуха высокого давления; 22 - лыжи; 23 - насос морской воды; 24 - технологические
лючки; 25 - Сбрасываемая часть легкого корпуса; 26 - аккумуляторные боксы
6. Тактико-технические данные проекта:
| водоизмещение | ||
| сухой вес: | 18,6 тонн | |
| скорость хода | ||
| подводная: | 3,0 узла | |
| максимальная подводная: | 5,0 узлов | |
| глубина погружения | ||
| рабочая: | 6000 метров | |
| кораблестроительные элементы | ||
| длина: | 7,8 метров | |
| ширина: | 3,8 метра | |
| высота: | 3,0 метра | |
| диаметр ПК: | 2,1 метра | |
| энергоустановка | ||
| тип: | электрическая | |
| запас энергообеспечения: | 100 кВт-час | |
| обитаемость | ||
| запас жизнеобеспечения: | 246 человека-часов | |
| экипаж: | 3 человека | |
7. Источники:
- Войтов Д.В. "Подводные обитаемые аппараты", АСТ, Астрель, Москва, 2002г.
- Сагалевич А.М. "Глубина", Научный мир, Москва, 2002г.
- Сагалевич А.М. "Подводные обитаемые аппараты Мир".
- Информация с сайта http://www.rian.ru
Дизайн, подборка материала и верстка Николаев А.С.© 2009-2013
{kind=link}