Проект подводного обитаемого аппарата «ОСА-3-600».
1. Количество аппаратов проекта: 1
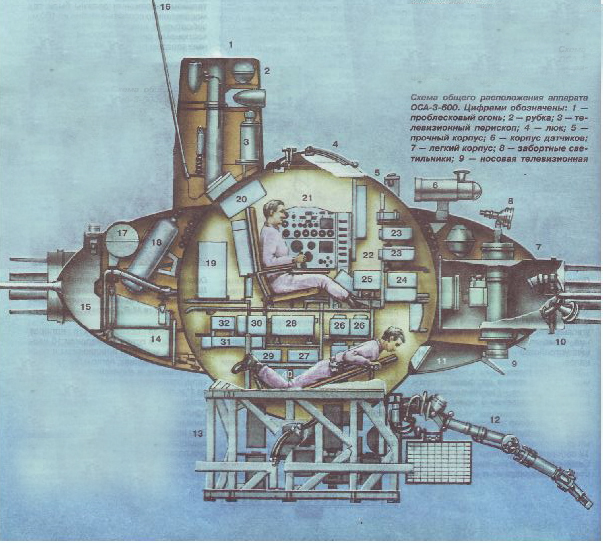
2. Изображение проекта:

3. Состав проекта:
Наименование аппарата |
Заводской номер |
Даты |
Примечания | ||
закладки |
спуска |
вступления в строй | |||
МОСКВА: ОКБ СТС (1) | |||||
- |
1975 |
1975 |
1976 |
||
4. История проекта:
Первый обитаемый подводный аппарат ОКБ СТС "ОСА-3-600" с экипажем три человека и с глубиной погружения 600 метров был разработан, построен и испытан в 1976 году по заказу Министерства рыбного хозяйства СССР. Аппарат был оснащен четырьмя крыльчатыми движителями, которые позволяли осуществлять перемещение в водной среде во всех плоскостях, а так же зависать над точкой. Он был предназначен для биологических, ихтиологических, гидрологических, гидрофизических и прочих исследований в рыбной и других отраслях народного хозяйства.
Аппарат многоцелевой и являлся принципиально новым универсальным устройством для проведения подводных исследований и работ на шельфе и в открытых районах океана.
Научно-исследовательские приборы и оборудование, установленные на аппарате, позволяли решать разнообразные задачи: проводить промысловую и геологическую разведку, детальные исследования рыбопромысловых объектов, изучение бентоса, донных животных, рыб, их концентрации, миграции, состояние нерестилищ, контроль показаний приборов, исследование рельефа дна, геологических отложений и т.п.
"ОСА-3-600" был первым динамически стабилизированным подводным аппаратом. Это свойство позволяло ему сохранять заданное положение в пространстве независимо от воздействия внешних возмущающих сил и моментов. Его управляемость обеспечивалась совокупными действиями автоматической системы управления и движительно-рулевого комплекса. Аппарат имел 6 степеней свободы. В межбортном пространстве на фланцах прочного корпуса, на взаимоперпендикулярных осях размещались 4 герметичных цилиндрических отсека с крыльчатыми движителями диаметром 500 мм и лопастями длиной 350 мм с 20-сильными гидравлическими приводами. Отсеки для охлаждения приводов были заполнены авиационным керосином.
Аппарат был оснащен комплексной навигационной системой с вычислительным устройством, гидроакустической коррекцией глубины, комплексной системой наблюдения и связи с гидролокатором кругового обзора, телевизионной системой, эхолотом, самописцами; автоматической системой безопасности, манипуляторным устройством и рядом других сложных электронных систем.
Аппарат управлялся в горизонтальной и вертикальной плоскостях во всем диапазоне скоростей. Он был способен передвигаться по любой пространственной траектории, в том числе лагом, и с высокой точностью выполнять любой пространственный маневр, а также зависать над объектом. Для этого аппарат имел четыре крыльчатых движителя и автоматизированную систему управления, изготовленную на базе серийного автопилота. Крыльчатые движители представляют собой несколько лопаток аэродинамического профиля, установленных по краю вращающегося в кожухе диска. В зависимости от угла поворота лопаток вокруг собственной оси, направления и скорости вращения диска движитель плавно менял силу тяги от нуля до максимальной и направление ее приложения. Это позволяло аппарату выполнять разнообразные пространственные маневры подобно вертолету. Главный конструктор аппарата "ОСА-3-600" Виктор Петрович Шматок еще в 1959 году отработал идею крыльчатых движителей на макете - малой подводной лодке "ШОС", которую он лично испытал в Купеческой гавани Кронштадта.
Безопасность плавания и эксплуатации гарантировалась системой жизнеобеспечения, автоматической системой безопасности, которая контролировала потенциально опасные состояния аппарата и обеспечивала автоматическое всплытие при аварийных ситуациях.
Все научное оборудование управлялось дистанционно, а работа батометров и по заранее заданной программе. Для проведения научно-исследовательских работ на аппарате были установлены:
- поворотное телевизионное перископическое устройство;
- система телеметрии на 48 каналах записи;
- кинокамеры, фотоаппарат;
- система измерения параметров окружающей среды "ПОТОК";
- блок сменного забортного оборудования;
- электрогидравлический манипулятор со сменным инструментом и боксами для образцов;
- блок батометров для отбора проб воды;
- планктонособиратепь;
- 10 светильников забортного освещения.
В 1980 году ОКБ СТС спроектировало, построило и испытало более совершенный аппарат по заказу Дальневосточного научного центра Академии наук СССР, который получил наименование "Океанолог".
5. Схема проекта:
6. Тактико-технические данные проекта:
| водоизмещение | ||
| полное: | 13 тонн | |
| скорость хода | ||
| подводная: | 3,0 узла | |
| глубина погружения | ||
| рабочая: | 600 метров | |
| кораблестроительные элементы | ||
| длина легкого корпуса: | 4,5 метров | |
| высота: | 5,8 метра | |
| энергоустановка | ||
| тип: | электрическая | |
| обитаемость | ||
| рабочая автономность: | 8 часов | |
| аварийная автономность: | 48 часов | |
| экипаж: | 3 человека | |
7. Источники:
- Голосов А.А. "Обитаемые подводные аппараты рыболовного флота России" (http://www.commdiving.ru).
- Королев А.Б."Подводная техника и водолазные работы в рыбной отрасли России" (http://www.commdiving.ru/2001-2/fish_branch.html).
- Королев А.Б. "Водолазание в России от древних времен до наших дней", Издательство ВНИРО, Москва, 2004г.
- Информация с сайта ФГУП "ОКБ СТС" (http://www.okbctc.ru).
- Войтов Д.В. "Подводные обитаемые аппараты" АСТ, Астрель, Москва, 2002г.
- Бондаренко Л. "Как создавался подводный вертолет", Альманах "Паруса творчества", выпуск 2, Киев, 2011г.
- "Создание сверхманёвренного обитаемого подводного аппарата ОСА-3-600" (http://rusdarpa.ru)
Возврат на Главную страницу сайта «Штурм Глубины»
Дизайн, подборка материала и верстка Николаев А.С.© 2002-2020